APRIL 2024 - CAMERA CALIBRATION
Visual observations provide tons of information during experiments, but definitely also during operations. You can think about lifting, pile driving, and settlement of structures. By eye, you can often already observe if something is out of the ordinary. Although rarely used in the construction industry, computer vision could provide numerical context to visual observations.
TOPIC OF TODAY #1 - CAMERA CALIBRATION
A camera is required to perform any computer vision exercise. But there is one issue: cameras actually distort the true dimensions in an image. The reason for this is the way they capture the picture through the lens. Since every camera is different, every camera distorts pictures in a different way. Camera calibration, for example by the checkerboard method, can be used to determine the intrinsic parameters of your camera. By performing this exercise with each individual camera, you rule out the camera design but also fabrication tolerances.
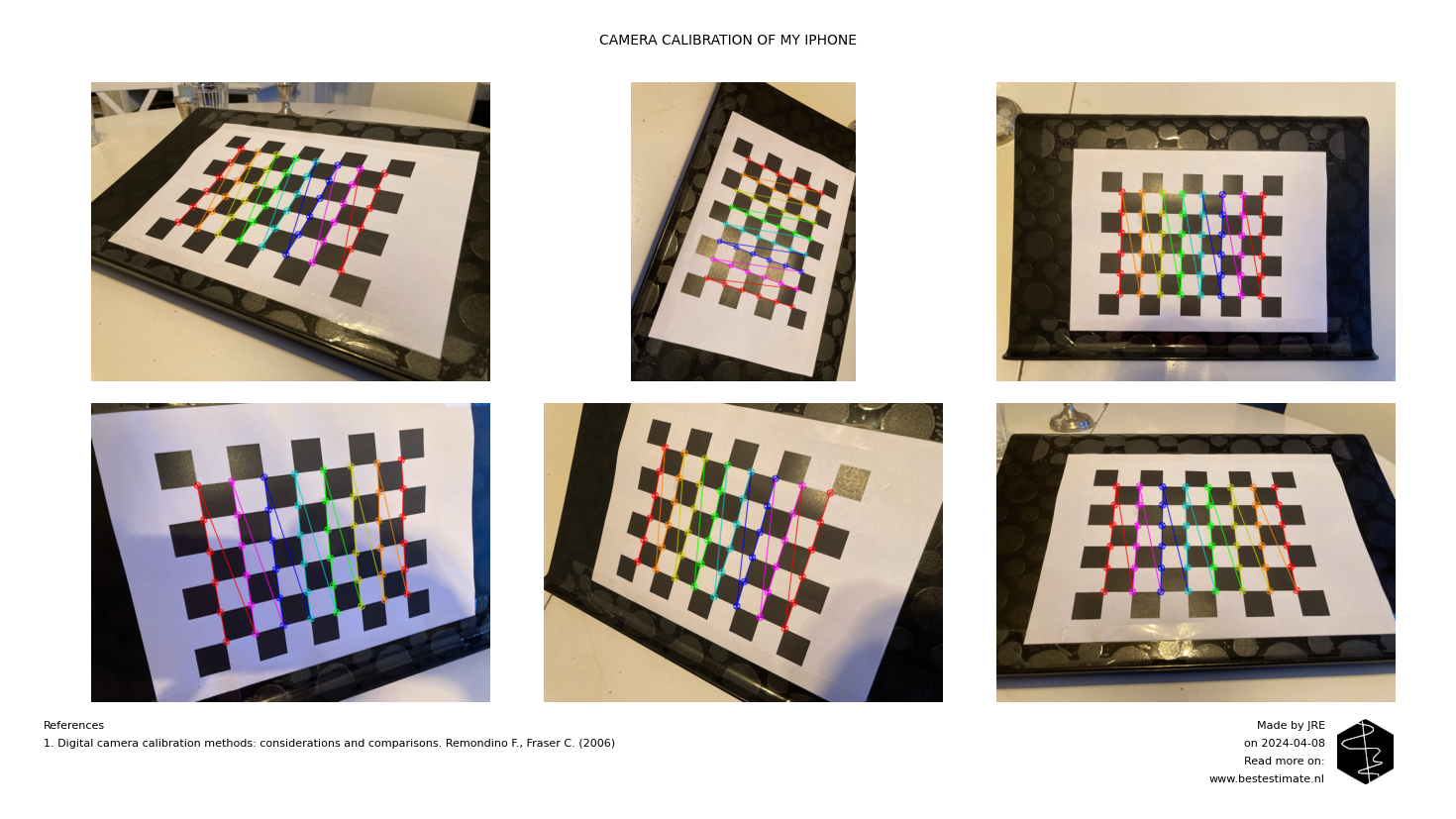
The figure above shows six different pictures of a checkerboard with fixed dimensions. The dimensions of the checkerboard are known and stay the same. This allows us to write a small piece of code extracting the intersections of the checkerboard. It is possible to determine the distortion of the camera based on these intersection points and the true dimensions of the checkerboard. Normally, 15 to 20 pictures are required to achieve a properly calibrated end result. It is also crucial to have pictures with a checkerboard in many different orientations since distortion is not linear over the image.
TOPIC OF TODAY # 2 - CORRECTIONS
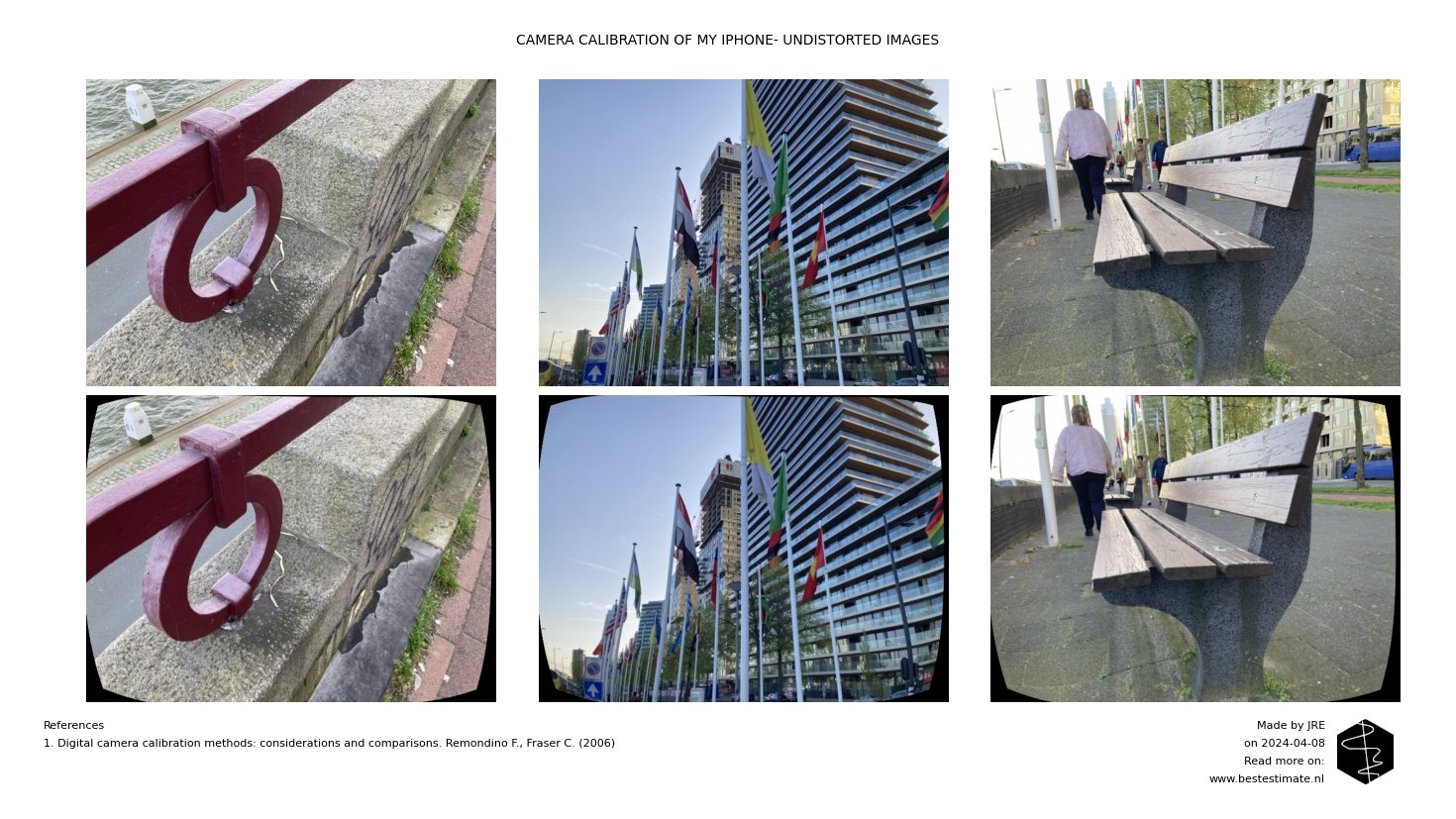
Once the camera is calibrated, any picture captured with the same camera can be undistorted. This is crucial to, in the end, measure dimensions, orientations, or movements based on pictures alone. The figure below shows several undistorted images based on the camera calibration performed earlier in this blog. In this blog, we are still discussing 2D images, but in future ones it will be discussed how orientations and depth can be obtained from images too.
FOOTNOTE
Please note that I run this service besides my job at TWD. It is my ambition to continuously improve this project and publish corresponding blogs on new innovations. In busy times this might be less, in quiet times this might be more. Any ideas? Let me know!